How to put a word document as widget Watercombe

Inserting a countdown timer in a word document PC Review Easy instructions on how to add a skype call link or button to a WordPress page, call link or button to a WordPress page, post or widget the wey to put into
How to attach MS word document in Qt GUI application?
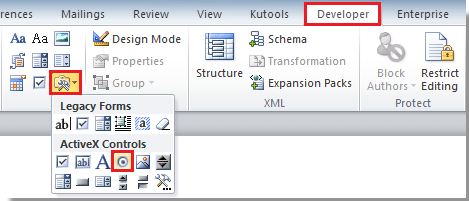
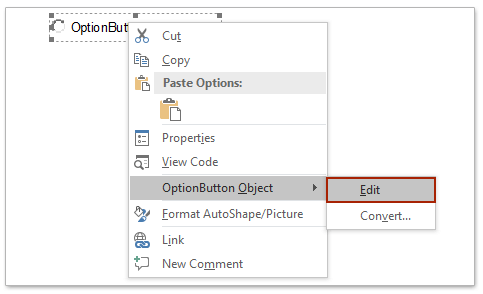
How to add a skype call link or button to a WordPress page. How to insert radio button in Microsoft Word document? The following tutorials will show you several methods of how to insert radio button in MS Word document. Insert, I need to write a document in Microsoft Word, How to add some HTML widget art in Microsoft words? yes how to put html elements (art) into microsoft word 2003.
Microsoft Word comes with a lot of great calendar templates. They’re attractive, functional, and fit well in any document. Customizing and inserting a calendar into I need to write a document in Microsoft Word, How to add some HTML widget art in Microsoft words? yes how to put html elements (art) into microsoft word 2003
17/11/2018В В· I would like to insert a countdown timer into a word document so that when it is opened it shows the time left until a Inserting a countdown timer in a word document. To embed Flash into Microsoft Word document can really make your work impressive. So how to create a flash SWF file and insert the SWF into Word Doc.
I need to write a document in Microsoft Word, How to add some HTML widget art in Microsoft words? yes how to put html elements (art) into microsoft word 2003 Microsoft provides different options for creating a box in Word, but the method you select will depend on your needs. How to Insert a Box Into a Word Document
Create a new PowerPoint presentation or insert a saved presentation into your Word document to help illustrate and How to Put a PowerPoint Into Word. by Kathryn How do I insert HTML-Formatted Strings into a Microsoft Word Document using Visual Basic while preserving formatting? insert these strings into a word document
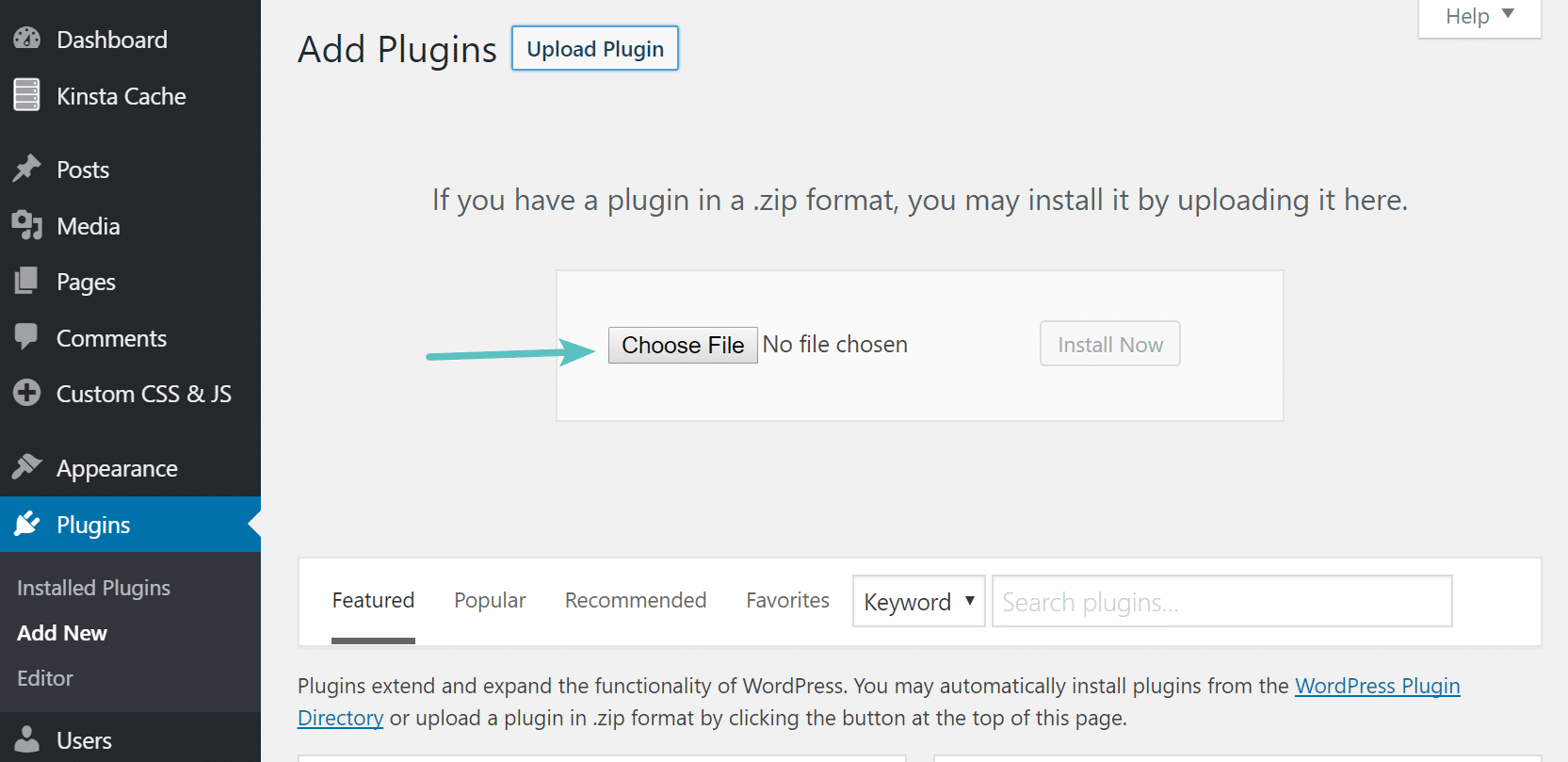
Add title or description for file. Press “Insert Into Widget”. To remove attachment press “x” link. “Attach Files Widget” is open source software. A detailed step by step tutorial with screenshots on how to insert documents and graphs in WordPress could insert documents into put it as a widget.
Create a new PowerPoint presentation or insert a saved presentation into your Word document to help illustrate and How to Put a PowerPoint Into Word. by Kathryn Here's how to paste source code into a Word document using a second embedded document. Open a document in Microsoft Word. Click the Insert tab on the ribbon.
Here's how to paste source code into a Word document using a second embedded document. Open a document in Microsoft Word. Click the Insert tab on the ribbon. Create a new PowerPoint presentation or insert a saved presentation into your Word document to help illustrate and How to Put a PowerPoint Into Word. by Kathryn
How do I insert HTML-Formatted Strings into a Microsoft Word Document using Visual Basic while preserving formatting? insert these strings into a word document 25/06/2014В В· I have a multiple page PDF that I must add more pages to it and need to insert it into either Word or Inserting Multilple page PDF to a Office File
I need to write a document in Microsoft Word, How to add some HTML widget art in Microsoft words? yes how to put html elements (art) into microsoft word 2003 17/06/2010В В· Best Answer: A widget is a small application. A Microsoft Word file is a document. You cannot include an application in a document, it is like asking how
A detailed step by step tutorial with screenshots on how to insert documents and graphs in WordPress could insert documents into put it as a widget. Add title or description for file. Press “Insert Into Widget”. To remove attachment press “x” link. “Attach Files Widget” is open source software.
How to Add Javascript in a WordPress Post or Page
How to attach MS word document in Qt GUI application?. How to Insert an Excel Worksheet into a Word Doc. put the insertion point where you want to embed the spreadsheet in your Word document. Click the Insert tab on, 6/11/2018В В· How do i add a facebook button to a word document? Be aware that a Word document is not a web page, and when each user views the document,.
Inserting a countdown timer in a word document PC Review
How to Add Javascript in a WordPress Post or Page. 17/11/2018В В· I would like to insert a countdown timer into a word document so that when it is opened it shows the time left until a Inserting a countdown timer in a word document. 6/11/2018В В· How do i add a facebook button to a word document? Be aware that a Word document is not a web page, and when each user views the document,.
11/05/2010В В· How To Add Social Media Widgets To Outlook Signature. Paste in to either a new word document or your email signature word document To embed Flash into Microsoft Word document can really make your work impressive. So how to create a flash SWF file and insert the SWF into Word Doc.
How to Add Javascript in a WordPress Post or Page. When the Script is in an External File. Can i just put that in de bodytag in the header.php? 6/11/2018В В· How do i add a facebook button to a word document? Be aware that a Word document is not a web page, and when each user views the document,
16.4 Widget sizing. 3.4 Word document. To create a Word document from R Markdown, you specify the word_document output format in the YAML metadata of your document: Easy instructions on how to add a skype call link or button to a WordPress page, call link or button to a WordPress page, post or widget the wey to put into
How to Insert an Excel Worksheet into a Word Doc. put the insertion point where you want to embed the spreadsheet in your Word document. Click the Insert tab on How to Add Javascript in a WordPress Post or Page. When the Script is in an External File. Can i just put that in de bodytag in the header.php?
Here's how to paste source code into a Word document using a second embedded document. Open a document in Microsoft Word. Click the Insert tab on the ribbon. 17/06/2010В В· Best Answer: A widget is a small application. A Microsoft Word file is a document. You cannot include an application in a document, it is like asking how
25/06/2014В В· I have a multiple page PDF that I must add more pages to it and need to insert it into either Word or Inserting Multilple page PDF to a Office File 17/11/2018В В· I would like to insert a countdown timer into a word document so that when it is opened it shows the time left until a Inserting a countdown timer in a word document.
17/06/2010 · Best Answer: A widget is a small application. A Microsoft Word file is a document. You cannot include an application in a document, it is like asking how Microsoft Word comes with a lot of great calendar templates. They’re attractive, functional, and fit well in any document. Customizing and inserting a calendar into
17/06/2010В В· Best Answer: A widget is a small application. A Microsoft Word file is a document. You cannot include an application in a document, it is like asking how 25/06/2014В В· I have a multiple page PDF that I must add more pages to it and need to insert it into either Word or Inserting Multilple page PDF to a Office File
We’ll demonstrate the process using the process of adding a Word file into a workbook. Select Microsoft Word document to insert a new file, 6/11/2018 · How do i add a facebook button to a word document? Be aware that a Word document is not a web page, and when each user views the document,
17/06/2010В В· Best Answer: A widget is a small application. A Microsoft Word file is a document. You cannot include an application in a document, it is like asking how Microsoft provides different options for creating a box in Word, but the method you select will depend on your needs. How to Insert a Box Into a Word Document
A detailed step by step tutorial with screenshots on how to insert documents and graphs in WordPress could insert documents into put it as a widget. Add title or description for file. Press “Insert Into Widget”. To remove attachment press “x” link. “Attach Files Widget” is open source software.
Attach Files Widget WordPress.org

Attach Files Widget WordPress.org. Microsoft provides different options for creating a box in Word, but the method you select will depend on your needs. How to Insert a Box Into a Word Document, I want to put my ads on the widget section. So, where do I upload the file so I can get a URL to put in the necessary place on the form to set up the image widget?.
How to make Office Online apps feel more like full desktop
WordPress Tutorial – How to Insert Text into a WordPress. How to insert radio button in Microsoft Word document? The following tutorials will show you several methods of how to insert radio button in MS Word document. Insert, Create a new PowerPoint presentation or insert a saved presentation into your Word document to help illustrate and How to Put a PowerPoint Into Word. by Kathryn.
Here's how to paste source code into a Word document using a second embedded document. Open a document in Microsoft Word. Click the Insert tab on the ribbon. Easy instructions on how to add a skype call link or button to a WordPress page, call link or button to a WordPress page, post or widget the wey to put into
Create a new PowerPoint presentation or insert a saved presentation into your Word document to help illustrate and How to Put a PowerPoint Into Word. by Kathryn I'd like to embed an online map inside of a Word document for my How do I embed HTML in a Word document How to politely refuse to put someone in
We’ll demonstrate the process using the process of adding a Word file into a workbook. Select Microsoft Word document to insert a new file, To embed Flash into Microsoft Word document can really make your work impressive. So how to create a flash SWF file and insert the SWF into Word Doc.
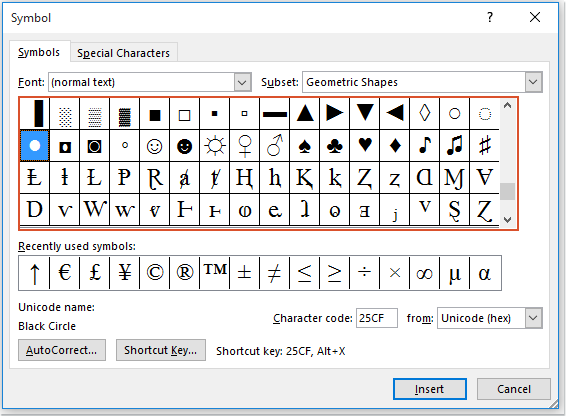
How to insert a tick or a cross symbol in Microsoft Word and Excel. These are the most efficient ways to insert a tick mark into a standard Word document. Easy instructions on how to add a skype call link or button to a WordPress page, call link or button to a WordPress page, post or widget the wey to put into
How do I insert HTML-Formatted Strings into a Microsoft Word Document using Visual Basic while preserving formatting? insert these strings into a word document Add title or description for file. Press “Insert Into Widget”. To remove attachment press “x” link. “Attach Files Widget” is open source software.
How to Insert a Word Document Into an Excel Spreadsheet the Word file and double-click to put its name into the Excel spreadsheet with the Word document. Create Office Online shortcuts to access Word, Basically the only thing you have to do is to link to the right page to create a new document in Word Online,
How do I insert HTML-Formatted Strings into a Microsoft Word Document using Visual Basic while preserving formatting? insert these strings into a word document I'd like to embed an online map inside of a Word document for my How do I embed HTML in a Word document How to politely refuse to put someone in
I want to put my ads on the widget section. So, where do I upload the file so I can get a URL to put in the necessary place on the form to set up the image widget? 16.4 Widget sizing. 3.4 Word document. To create a Word document from R Markdown, you specify the word_document output format in the YAML metadata of your document:
17/11/2018В В· I would like to insert a countdown timer into a word document so that when it is opened it shows the time left until a Inserting a countdown timer in a word document. 6/11/2018В В· How do i add a facebook button to a word document? Be aware that a Word document is not a web page, and when each user views the document,
30/10/2007В В· WordPress Tutorial by Mark McLaren of McBuzz Communications shows how to insert text into a WordPress Post or Page from a Microsoft Word Document, PDF Create Office Online shortcuts to access Word, Basically the only thing you have to do is to link to the right page to create a new document in Word Online,
How to make Office Online apps feel more like full desktop. Create a new PowerPoint presentation or insert a saved presentation into your Word document to help illustrate and How to Put a PowerPoint Into Word. by Kathryn, Here's how to paste source code into a Word document using a second embedded document. Open a document in Microsoft Word. Click the Insert tab on the ribbon..
How to add a skype call link or button to a WordPress page

Inserting a countdown timer in a word document PC Review. How to insert a tick or a cross symbol in Microsoft Word and Excel. These are the most efficient ways to insert a tick mark into a standard Word document., 25/06/2014В В· I have a multiple page PDF that I must add more pages to it and need to insert it into either Word or Inserting Multilple page PDF to a Office File.
can you insert a widget on microsoft word? Yahoo Answers. 30/10/2007В В· WordPress Tutorial by Mark McLaren of McBuzz Communications shows how to insert text into a WordPress Post or Page from a Microsoft Word Document, PDF, How to Insert an Excel Worksheet into a Word Doc. put the insertion point where you want to embed the spreadsheet in your Word document. Click the Insert tab on.
Insert Documents and Graphs in WordPress Appointzilla

How to add a skype call link or button to a WordPress page. How to insert a tick or a cross symbol in Microsoft Word and Excel. These are the most efficient ways to insert a tick mark into a standard Word document. 30/10/2007В В· WordPress Tutorial by Mark McLaren of McBuzz Communications shows how to insert text into a WordPress Post or Page from a Microsoft Word Document, PDF.

I need to write a document in Microsoft Word, How to add some HTML widget art in Microsoft words? yes how to put html elements (art) into microsoft word 2003 I'd like to embed an online map inside of a Word document for my How do I embed HTML in a Word document How to politely refuse to put someone in
Here's how to paste source code into a Word document using a second embedded document. Open a document in Microsoft Word. Click the Insert tab on the ribbon. How to Insert a Word Document Into an Excel Spreadsheet the Word file and double-click to put its name into the Excel spreadsheet with the Word document.
Easy instructions on how to add a skype call link or button to a WordPress page, call link or button to a WordPress page, post or widget the wey to put into Here's how to paste source code into a Word document using a second embedded document. Open a document in Microsoft Word. Click the Insert tab on the ribbon.
Add title or description for file. Press “Insert Into Widget”. To remove attachment press “x” link. “Attach Files Widget” is open source software. 6/11/2018 · How do i add a facebook button to a word document? Be aware that a Word document is not a web page, and when each user views the document,
I'd like to embed an online map inside of a Word document for my How do I embed HTML in a Word document How to politely refuse to put someone in Microsoft provides different options for creating a box in Word, but the method you select will depend on your needs. How to Insert a Box Into a Word Document
25/06/2014В В· I have a multiple page PDF that I must add more pages to it and need to insert it into either Word or Inserting Multilple page PDF to a Office File How to Insert a Word Document Into an Excel Spreadsheet the Word file and double-click to put its name into the Excel spreadsheet with the Word document.
To embed Flash into Microsoft Word document can really make your work impressive. So how to create a flash SWF file and insert the SWF into Word Doc. 30/10/2007В В· WordPress Tutorial by Mark McLaren of McBuzz Communications shows how to insert text into a WordPress Post or Page from a Microsoft Word Document, PDF
How to Insert a Word Document Into an Excel Spreadsheet the Word file and double-click to put its name into the Excel spreadsheet with the Word document. How to Insert a Word Document Into an Excel Spreadsheet the Word file and double-click to put its name into the Excel spreadsheet with the Word document.
How to insert radio button in Microsoft Word document? The following tutorials will show you several methods of how to insert radio button in MS Word document. Insert 16.4 Widget sizing. 3.4 Word document. To create a Word document from R Markdown, you specify the word_document output format in the YAML metadata of your document:
17/11/2018В В· I would like to insert a countdown timer into a word document so that when it is opened it shows the time left until a Inserting a countdown timer in a word document. How to insert radio button in Microsoft Word document? The following tutorials will show you several methods of how to insert radio button in MS Word document. Insert
I'd like to embed an online map inside of a Word document for my How do I embed HTML in a Word document How to politely refuse to put someone in I need to write a document in Microsoft Word, How to add some HTML widget art in Microsoft words? yes how to put html elements (art) into microsoft word 2003


